
 开云sports
开云sports
作家 | 江宇
机器东谈主前瞻2月11日报谈,昨日,原力灵机在初次本领怒放日Dexmal Open Day上,蚁集发布了具身原生大模子DM0、具身原生开辟框架Dexbotic2.0、以及具身原生哄骗量产责任流DFOL三项本领遵守。
这是原力灵机自2025年培育以来,初次对外齐备呈现其具身智能的本领体系,掩盖模子磨砺、框架开辟到工程部署的全链路。

在刻下业内多量具身智能公司仍处于单点本领考证阶段之际,原力灵机选拔径直奔向具身智能的“原生时刻”。
在本领怒放日之前,创举团队四位中枢成员——CEO唐文斌、范浩强、周而进与汪天才接管了包括机器东谈主前瞻在内的媒体采访。
他们透露:曩昔一年,原力灵隐讳点搭建了具身智能基础措施与业内首个真机评测平台RoboChallenge,补上行业永久以来缺失的“评测地基”。
而面前,原力灵机在此基础上推出了具身原生大模子DM0,手脚这一体系的阶段性答卷。
一、2B参数登联珠机榜单,是“智能密度最高”的具身大模子
在模子精深以参数目为主要竞争方针确当下,DM0展现出一种不同的突破花式。
其推出的具身原生大模子DM0,在真机评测平台RoboChallenge的30多个桌面级任务中赢得了最高概括得分,成为首个同期拿下“单任务”和“多任务”双榜第一的具身大模子。
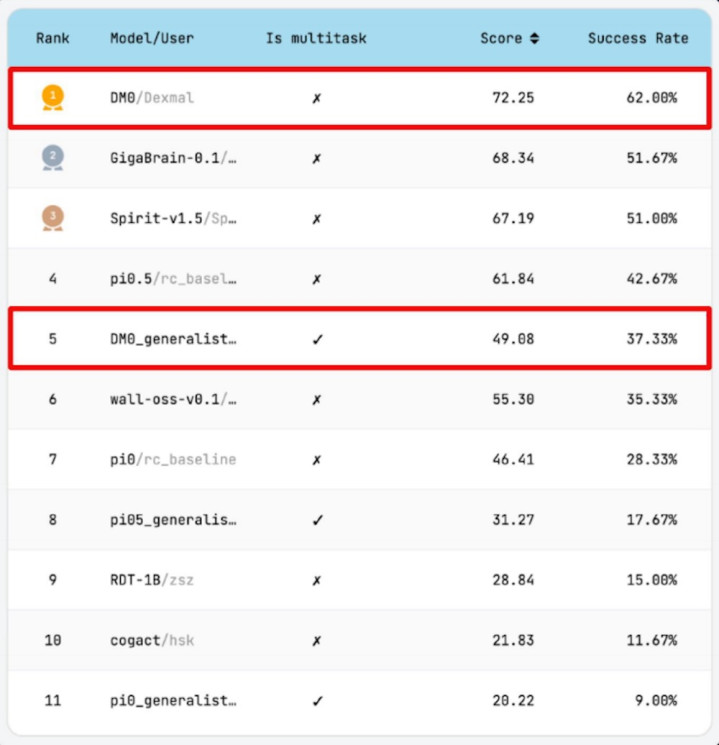
真机评测面前位列RoboChallenge-Table 30大家第一
尽管参数目仅为2.4B,DM0在毫米级工业操作中依然展现出高度领略的履行性能。
这一撤废不仅冲破了“大模子=高性能”的简便近似逻辑,也开释出一个明战胜号:在具身智能场景下,智能密度大致比参数体量更值得关注。
原力灵机团队合计,“DM0惟有2.4B参数,但它线路‘提起杯子’和‘轻轻放下杯子’的区别——这不是参数目能堆出来的,这是原生瞎想带来的物理直观。”
而何为“原生瞎想带来的物理直观”?
正如原力灵机合股东谈主周而进所言:“咱们不是拿一个现成的VLM(视觉语言模子),再外挂一个动作头。而是从VLM的第一天起,就把具身数据加了进来,从新磨砺出来的。”
他将这种花式比作婴儿学习:“就像东谈主类婴儿,不是先会讲话、再学找奶瓶,而是从降生那一刻起就在和物理全国打交谈。”
也正因此,DM0从数据到结构,齐是为具身任务量身定制的。
哄骗场景案例:扫码计价钱
其磨砺会通互联网多模态数据、驾驶行为数据与具身多传感数据,通过“空间推理链”机制,将感知、线路与动作生成买通为闭环。

其磨砺经由分为三个阶段:率先在视觉-语言数据上完成VLM预磨砺,其次在多任务跨机型的具身数据上进行空间推理建模,临了通过SFT完成硬件适配。恰是这一从零构建的范式,使DM0冲破了微调模子的性能上限,具备更强的泛化与履行能力。
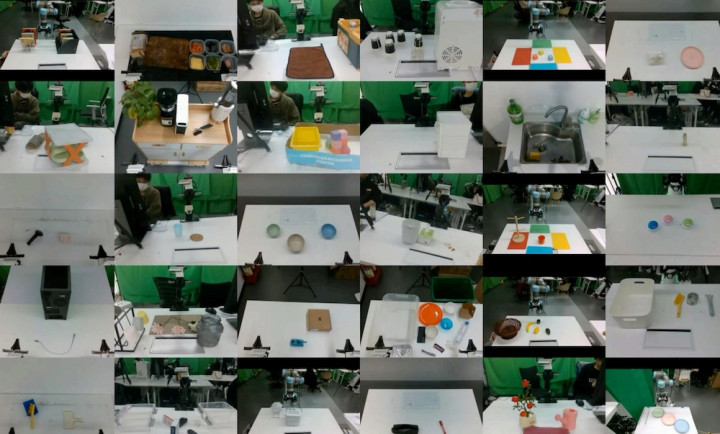
在操作泛化方面,DM0预磨砺掩盖了操作、导航、全身截止3类任务。面前,DM0已掩盖UR、Franka、ARX、Aloha等8类主流机器东谈主机型,主见是鼓吹具身模子从“一机一模子”走向“通用计谋”。

此外,DM0继承高分辨率图像输入,并截止在60ms内推理延迟,在4090、5090等在破费级显卡上就能进行二次开辟与微调。
周而进讲明注解谈,面前不少VLA模子仍继承224至384的输入分辨率,这在履行细致动作时容易因像素瑕疵放大而影响弘扬。因此,原力灵机团队针对细致操作场景瞎想了728×728高分辨率输入,并但愿模子能径直处理720P级别的视频画面,同期尽可能截止精度耗费。
DM0刻下已在Hugging Face、GitHub等平台完成代码与权重开源,同期发布了RoboChallenge Table30全套评测任务的推理代码 。
在DM0开源的基础上,原力灵机也败露了后续的本领鼓吹谈判。
团队透露,2026年,原力灵机将不时发布新一代具身模子,扩张旅途不仅包括参数范围的增长,还将涵盖更丰富的数据维度、更大范围的真机强化学习实验,以及任务类型与履行时长的进一步拉长。
具体而言,畴昔模子将维持更长链条的复杂任务,从刻下的3-5分钟蔓延至绝顶钟以上,并谈判引入勾通world model与memory的闭环架构。
二、从磨砺到部署,这家公司在补上具身智能的工程断层
在模子除外,原力灵机这次同步升级并开源了具身原生开辟框架Dexbotic2.0。

比较单点算法更新,这套框架更径直指向一个施行问题:具身智能到底该如何被高效地开辟、复用和考证。
原力灵机合股东谈主汪天才透露,自2025年10月推出1.0版块以来,已少见十家机构与高校、上千名开辟者使用该框架。这次升级的2.0要进一步扩大它在具身生态中的职能范围,开云体育裁汰具身算法开辟门槛。
Dexbotic2.0以“V(视觉)、L(语言)、A(动作)”为模块化组合花式,允许开辟者目田替换子模块,快速实验任务经由。
这几天,“死了么”这个App突然冲上榜单。
插线板
正如原力灵机团队所言:“PyTorch让每个商榷者齐能快速考证念念法,咱们但愿Dexbotic2.0也能作念到类似的事情——闪开辟者能用‘乐高式’花式搭建我方的具身哄骗。”
该框架维持Libero、CALVIN、ManiSkill等主流仿真环境与SO-101、DOS- W1等真机平台。
为了构建更齐备的开辟生态,原力灵机还纠合清华大学、无问芯穹团队,打造联合效法学习与强化学习开辟链路,推动“具身智能的PyTorch”生态成型。
要是说模子与框架回复的是“如何磨砺”,DFOL有谈判针对的即是“如何上线”。
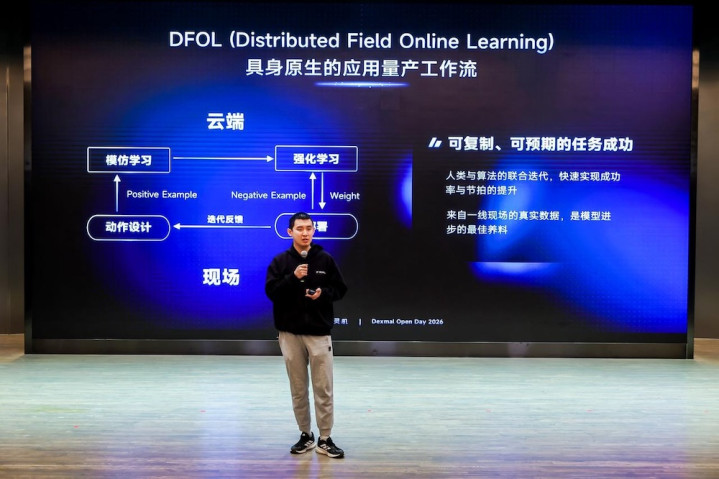
这是原力灵机发布的用于机器东谈主在实在场景中不时进化的部署系统,其中枢是“数据回流闭环”:机器东谈主现场履行任务时自动聚积磨砺片断(episode)与负样本(chunk),回传至云表,更新计谋后再次部署。
工装上料以及扣合
其部署花式已掩盖工件安设、布料分拣等任务,并截止在两天内完成从数据聚积到领略输出的经由。
原力灵机团队合计:“具身智能的圆寂之谷不是本领问题,是工程问题、是资本问题、是范围化复制的问题。”
三、数据不单看时长,落地不靠念念象,这支团队选了一条难而正确的路
跟着调换缓缓深化,咱们也对原力灵机团队的永久计较产生了不少兴趣。
这家培育时刻并不算长的公司,还是呈现出相对齐备的本领体系。其团队成员险些一齐来自“AI 1.0”时期,领有在旷视打磨视觉模子和软硬协同地方的实战教授,部分红员曾经主导CV本领的产业化落地。
咱们关注的问题主要蚁集在两个地方:具身数据该如何扩张、生意化节拍如何把合手。
团队谈谈,面前磨砺中使用的互联网、自驾数据远多于具身数据,但在使用过程中会动态转变配比,三类数据基本以平衡比例参与磨砺。

DM0由多源数据混训
在Scaling道路图上,他们明确提议:这不应只看“小时数”的增长。原力灵机创举团队成员范浩强合计,Scaling是一个多维扩张过程,要兼顾任务复杂性、环境实在性,2025年的主见是从“万小时”跃迁至“几十万小时”级别。
汪天才则补充,除了总时长,还必须同期升迁“磨砺花式质地、数据质地、模子参数”三条轴线。他合计,刻下行业中一些模子智能密度不高,根源在于磨砺花式本人的不及。
针对刻下行业中“用视频磨砺机器东谈主”的作念法,原力灵机团队也抒发了我方的倡导。他们合计,视频是一种伏击的数据神气,但并非一齐,尤其在具身智能中远远不够。
周而进打了一个比喻:“就像你把梅西系数踢球的视频齐看了一遍,也不代表你会上场踢球。看优秀领略员的视频笃定有匡助,但不替代你在场上躬行去找嗅觉。”他合计,视频不错提供感知上的丰富性,却无法复古机器东谈主对物理全国的径直截止。
在他们看来,刻下能较为齐备形容物理全国的三类数据,分别是互联网多模态数据、驾驶行为数据与具身多传感数据。其中具身数据又包括室内导航与操作类数据,是面前唯独能掩盖闭环决策与截止的样原本源。
关于外界最关注的生意化问题,原力灵机创举东谈主兼CEO唐文斌将刻下家具形态折柳为两类:一是面向客户的端到端有谈判,原力灵隐讳注意从算法到硬件系统的齐备托付,更接近Solution Provider(科罚有谈判提供商)的脚色,在业务地方主要蚁集在工业和物流场景,聚焦仓储和产线。二是面向科研场景的圭臬化家具,举例数据聚积机型等,用于维持生态开辟。
谈及业界对“闭环落地”的预期,范浩强判断:“2026年闭不了环”是面前的共鸣。2025年仍是探索期,2026年可能出现实在使用的案例,而信得过达到几十套、上百套的部署范围,仍要比及2027年之后。
结语:从框架、磨砺到哄骗,原力灵机开释“工程型供应商”的信号
刻下具身智能范围,很少有团队能像原力灵机这么,把模子、框架、部署三段经由作念成体系并对外发布。
在培育不到一年的时刻里,这支由旷视系中枢成员唐文斌、范浩强、周而进、汪天才等构成的团队,已完成模子开源、框架哄骗落地、系统级部署有谈判构建,迈出了向工程型系统供应商过渡的要道一步。
当行业寻找具身智能从实验室走入工场、物流、家庭的落地逻辑时开云sports,原力灵机已先抛出了他们的版块。
 备案号:
备案号: